Home
Home
About Geosun
About Geosun
Products
Products
- Hardware
- Mobile LiDAR Scanning System
- gCollector Road Information Collection System
- gSpin POS System
- PPK Solution
Support
Support
News
News
Contact Us
Contact Us
High Precision
The system data structure is built upon single-frequency, dual-frequency CA code, P code, carrier phase, and Doppler shift. It resolves single-frequency and multi-frequency data and supports GPS modernized data, GLONASS data, and third-generation BDS data. It can also accept Galileo system data without the need to change any system framework, providing higher accuracy in calculation results and important reliability assurance.
High-precision differential dynamic positioning accuracy can reach centimeter-level, velocity accuracy can reach centimeter-per-second level, and the dynamic differential baseline accuracy can reach centimeter-level. After the cancellation of Selective Availability (SA), the typical single-point positioning accuracy is within several meters, while Gnss Explorer's precise single-point dynamic positioning accuracy can reach two to three decimeters. Its static positioning accuracy can even reach centimeter-level.
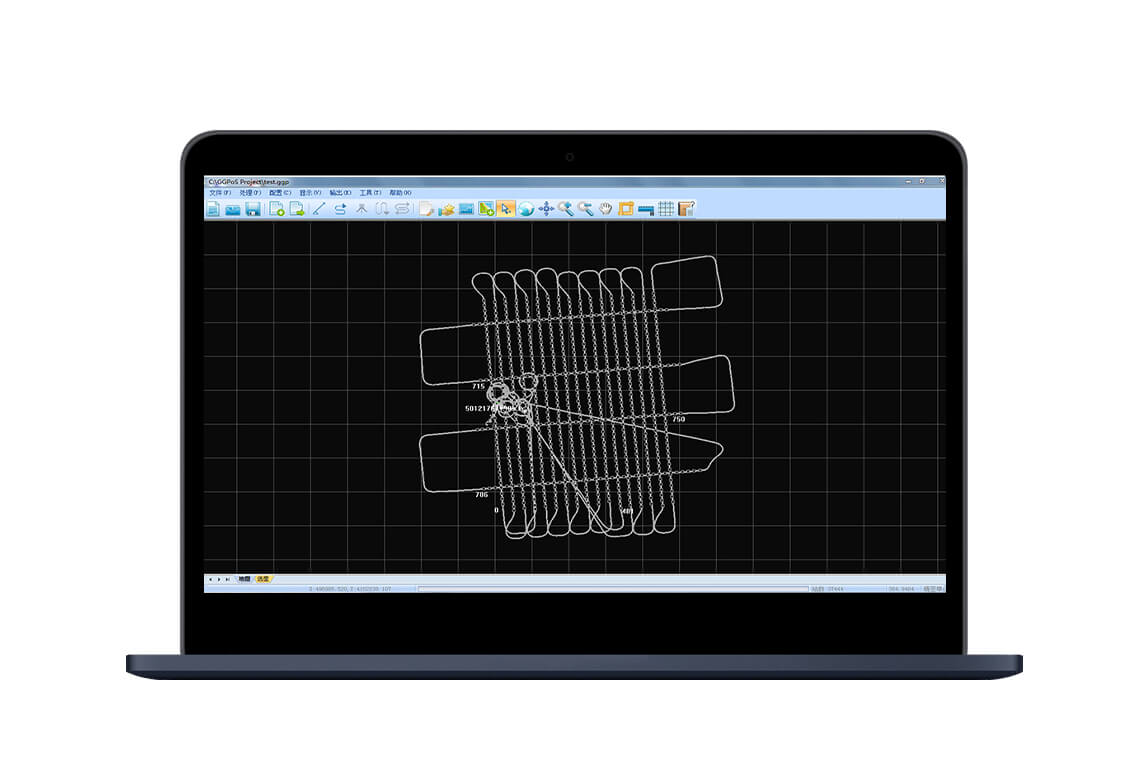
User-Friendly Graphical Interface
Users can perform various operations on the positioning result graph such as zooming in, zooming out, measuring distances, etc. Gnss Explorer provides an epoch-based sky plot display function, which can real-time calculate the Dilution of Precision (DOP) values of satellite observations for users to analyze and optimize positioning results.
Multiple Format Data Input and Output
Gnss Explorer can directly read raw data from various receivers in multiple formats without conversion. It can also process multiple-source data of different formats simultaneously, greatly facilitating complex data processing tasks. Users can customize result data with different content and up to 72 different units, outputting them in TXT text file format, and also export them to DXF data exchange file format.
Modular Design
Gnss Explorer can be flexibly customized according to user's need. In addition to functional customization, the core module interfaces can also be directly open to users. Providing products in the form of LIB or DLL, users can easily embed the relevant functions of GnssExplorer into their own systems.
◆ Single and multi-frequency single-epoch ambiguity resolution. The system integrates several advanced single-epoch ambiguity resolution techniques. Unlike the commonly used On-The-Fly (OTF) method, it can efficiently and reliably resolve single-frequency and dual-frequency ambiguities within seconds, effectively addressing common initialization issues.
◆ High-precision differential positioning and speed measurement.
◆ Precise single-point positioning and speed measurement.
◆ Real-time kinematic (RTK) positioning. It can calculate baseline information while both the base station and the rover are in motion.
◆ Tailored for complex applications, it offers user-assisted calculation functionality. Users can manually select satellites and manually remove poor-quality satellite data observations to enhance positioning accuracy. 。
◆ Multi-sample rate processing. It allows the base station and the rover to use different data rates. The system automatically interpolates or down-samples the raw data from the base station to achieve differential processing. In practical applications, due to limitations in base station receiver storage capacity, the base station can often use lower data rates for storage without affecting the processing accuracy.
◆ Intuitive graphical display and Analysis. It includes information such as position, velocity, positioning error, and residuals for visual analysis.
Dynamic Differential Positioning Accuracy
| Frequency | Horizontal Accuracy | Vertical Accuracy |
| Single Frequency | ±(30mm+1×10 -6 D) |
±(50mm+1×10
-6
D
)
|
| Dual Frequency |
±(10mm+1×10
-6
D
)
|
±(20mm+1×10
-6
D
)
|
Precise Single-Point Positioning Accuracy
| State | Time | Horizontal Accuracy( 1 σ ) | Elevation ( 1 σ ) |
| Dynamic | >5min | 10cm | 15cm |
| Static | >2h | 5cm | 7cm |
| >12h | 1cm | 3cm |
Static Differential Positioning Accuracy
| Frequency | Horizontal Accuracy | Elevation |
| Single Frequency |
±(5mm+1×10
-6
D)
|
±(10mm+1×10
-6
D)
|
| Dual Frequency |
±(2.5mm+1×10
-6
D)
|
±(5mm+1×10
-6
D)
|
◆ Surveying and Mapping: processing of various measurement data
◆ Transportation: vehicle management, vehicle inspection, container handling
◆ Waterway and Marine: buoy localization, channel measurement, vessel positioning, search and rescue
◆ Petroleum Exploration: pipeline localization, target localization
◆ Railway: train speed detection
◆ Aviation: photogrammetry and remote Sensing, aircraft Formation
Previous:Return

Power Line Patrol
Surveying And Mapping

Railway Application

Transportation Application

Maritime Operation



