Home
Home
About Geosun
About Geosun
Products
Products
- Hardware
- Mobile LiDAR Scanning System
- gCollector Road Information Collection System
- gSpin POS System
- PPK Solution
Support
Support
News
News
Contact Us
Contact Us
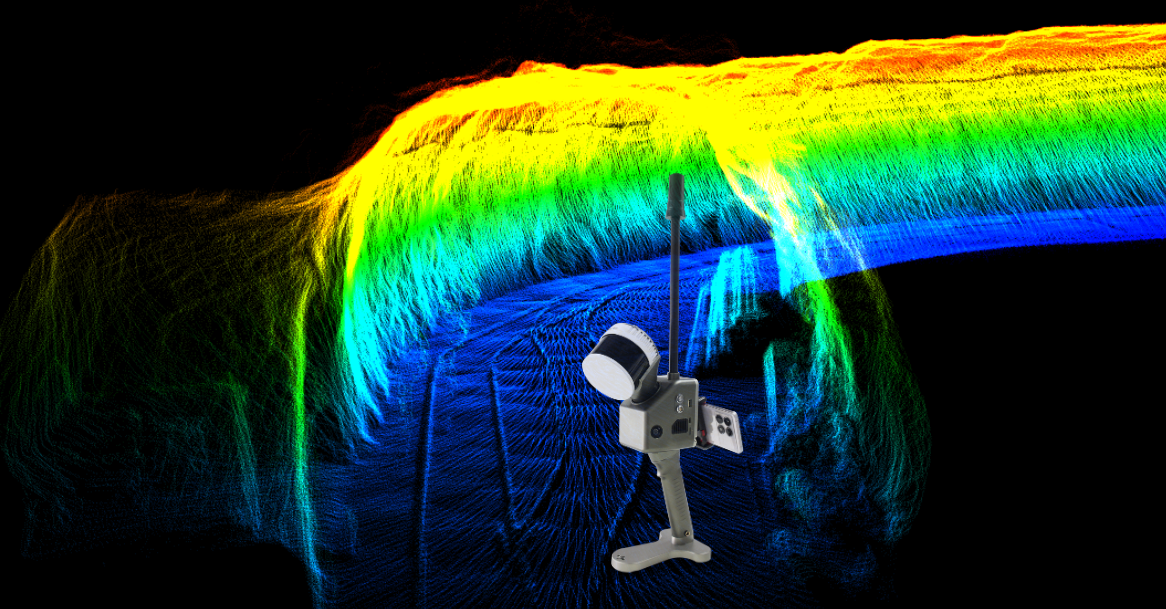
LiDAR 3D SLAM (Simultaneous Localization and Mapping) technology represents a groundbreaking fusion of LiDAR scanning and advanced algorithms to create real-time, high-definition 3D maps while simultaneously determining the precise position and orientation of a mobile platform. This innovative approach has revolutionized fields such as robotics, autonomous vehicles, augmented reality, and indoor mapping.
At its core, LiDAR (Light Detection and Ranging) technology employs laser pulses to measure distances to objects or surfaces, generating precise point cloud data that represents the environment's 3D structure. Traditionally, LiDAR systems have been used for static scanning applications, capturing detailed spatial information but lacking the ability to navigate and map dynamically changing environments in real-time.
Enter 3D SLAM technology, which bridges this gap by enabling LiDAR sensors to not only perceive the surrounding environment but also navigate through it autonomously while simultaneously constructing a detailed 3D map. This is achieved through a complex interplay of sensor data fusion, odometry, feature extraction, and probabilistic estimation algorithms.
The process typically begins with the LiDAR sensor scanning its surroundings and collecting point cloud data. Simultaneously, the SLAM algorithm processes this data, identifying distinctive features and landmarks within the environment. These features could include edges, corners, surfaces, or objects with unique geometric characteristics.
As the LiDAR-equipped platform moves through the environment, the SLAM algorithm continuously compares new sensor readings with the existing map and estimates the platform's pose (position and orientation) relative to the map. This process involves tracking the movement of the platform using odometry (motion estimation) techniques, which integrate information from various sensors, such as wheel encoders or inertial measurement units (IMUs).
At the same time, the SLAM algorithm refines the map by incorporating new observations and updating the positions of previously detected features. This iterative process of mapping and localization occurs in real-time, enabling the LiDAR-equipped platform to navigate complex environments, such as urban streets, warehouses, or construction sites, with high precision and autonomy.
The applications of LiDAR 3D SLAM technology are diverse and far-reaching. In robotics, it enables mobile robots to navigate autonomously in unstructured environments, such as warehouses or disaster zones, without relying on external infrastructure like GPS. In autonomous vehicles, it plays a crucial role in mapping the surrounding environment and localizing the vehicle within it, essential for safe and efficient navigation.
Furthermore, LiDAR 3D SLAM technology finds applications in augmented reality, where it enables the creation of highly accurate 3D maps of indoor spaces for immersive virtual experiences. It also facilitates indoor mapping and navigation for applications such as logistics, asset management, and indoor positioning systems.
2D SLAM vs 3D SLAM, What's the Differences?
2D SLAM and 3D SLAM share the same fundamental principle of simultaneous localization and mapping, they operate in distinct dimensions, each offering unique capabilities and applications.
2D SLAM, as the name suggests, deals with two-dimensional environments. It's primarily concerned with mapping the layout of the environment and localizing the robot's position within that 2D space. This technology is commonly employed in scenarios where the environment can be adequately represented on a flat plane, such as indoor environments, warehouses, or office buildings. 2D SLAM systems typically utilize sensors like laser rangefinders, sonar sensors, or cameras to gather data about the surroundings and estimate the robot's position and orientation relative to known landmarks or features.
In contrast, 3D SLAM extends this capability into the third dimension, allowing robots to perceive and navigate in full three-dimensional space. This technology is crucial for applications where the environment's vertical structure or complex geometry plays a significant role, such as outdoor environments, construction sites, or urban landscapes. 3D SLAM systems leverage sensors capable of capturing volumetric data, such as LiDAR (Light Detection and Ranging), depth cameras, or stereo cameras, to construct detailed 3D maps of the environment. These maps not only include information about the horizontal layout but also capture vertical structures, obstacles, and terrain variations.
The key differences between 2D SLAM and 3D SLAM lie in their respective capabilities and the complexity of the environments they can handle. While 2D SLAM is suitable for relatively flat and simple environments, 3D SLAM excels in more challenging and dynamic settings with complex terrain, multi-level structures, and varying elevations. Additionally, 3D SLAM provides a richer representation of the environment, enabling robots to perceive and interact with their surroundings more effectively.
In terms of applications, 2D SLAM finds use in indoor navigation, robotic vacuum cleaners, and logistics operations within confined spaces. On the other hand, 3D SLAM is indispensable for outdoor navigation, autonomous driving, mapping natural environments, and infrastructure inspection tasks that require a comprehensive understanding of the environment's three-dimensional structure.
Conclusion
In summary, LiDAR 3D SLAM technology represents a paradigm shift in spatial perception and navigation, enabling LiDAR-equipped systems to create detailed 3D maps while simultaneously determining their position and orientation in real-time. With its broad range of applications and ongoing advancements, this technology holds the promise of transforming industries and unlocking new possibilities in spatial understanding and autonomy.
URL:https://www.geosuntech.com/News/156.html
Previous:What Are the Differences Between Single-beam LiDAR and Multi-beam LiDAR
Next:What Is the POS (Position Orientation System) of LiDAR surveying