Home
Home
About Geosun
About Geosun
Products
Products
- Hardware
- Mobile LiDAR Scanning System
- gCollector Road Information Collection System
- gSpin POS System
- PPK Solution
Support
Support
News
News
Contact Us
Contact Us
Elastic Fusion Positioning System with Multi-source Heterogeneous Information to meet the Autonomous Driving
The combination positioning system represented by GNSS (satellite positioning)/INS (inertial navigation) integration has been widely applied in multiple industries. According to different industry needs, there are also some different specific technical solutions for combination positioning systems. Overall, GNSS has differences between single-point positioning and differential positioning, and within differential positioning, there are differences in the use of pseudorange and carrier phase observations. INS exists in different levels of device accuracy, and although the navigation algorithms are basically the same, this leads to differences in error models in the combination filter.
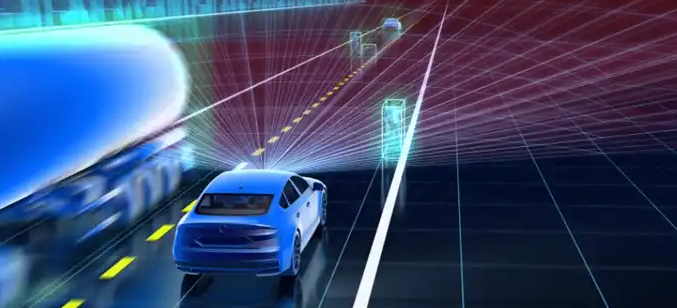
For land vehicle positioning, wheel speed (odometer) is almost indispensable. It effectively delays the accumulation of errors in INS when GNSS loses lock due to obstruction, but it needs to be calibrated in real-time before participating in the combination work. Image and Lidar have similar roles. On the one hand, they can use the coordinates of known map database feature points for spatial intersection to determine the geographical position of the vehicle, acting as anchor points. On the other hand, they can also use image and point cloud matching methods to achieve SLAM positioning, which can also delay the accumulation of errors in INS during GNSS loss of lock periods.
The key to integrating these technologies is to design a flexible filter based on understanding these technologies. This filter should be able to flexibly integrate spatial positioning information data of different physical types, mathematical principles, random characteristics, and spatiotemporal characteristics, outputting high-precision and highly reliable spatiotemporal state information of the moving carrier.
Combination Positioning Products and Applications in the Smart Driving Industry
Based on GNSS/INS/WS/Image/Lidar elastic deep integration technology, In fact Navigation has launched a series of combined positioning products for the smart driving industry. For high-precision positioning of Level 3 and above autonomous vehicles, the company has introduced the low-cost combined positioning box (PBox) gThrostle; for vehicle dynamic characteristics detection and BEV applications, the company has introduced the high-precision combined positioning and attitude measurement system gSpin, including four models: 310, 410, 510, and 610, to meet different accuracy requirements; based on gSpin, the company has launched the unmanned driving AI training ground truth vehicle gCollector.
gThrostle addresses the shortcomings commonly found in existing PBox products on the market, such as insufficient depth of combination, limited input information, low accuracy and reliability, heavy reliance on high-definition maps, and inadequate functional safety. By fully leveraging image and lidar data, it proposes an elastic deep integration technology route based on GNSS/INS/WS/Image/Lidar, breaking free from strong dependence on high-precision maps. The system can operate more optimally with high-precision maps, but even without them, it ensures accuracy, high reliability, and integrity.




gSpin is compatible with medium-accuracy MEMS IMUs as well as high-precision fiber optic gyro IMUs, supporting flexible access to GNSS/INS/WS/Image/Lidar data, and providing high-precision geographic reference and dynamic characteristic information for various moving platforms. The gSpin series products are shown in Figure 2, and the accompanying post-processing software is shown in Figure 3.
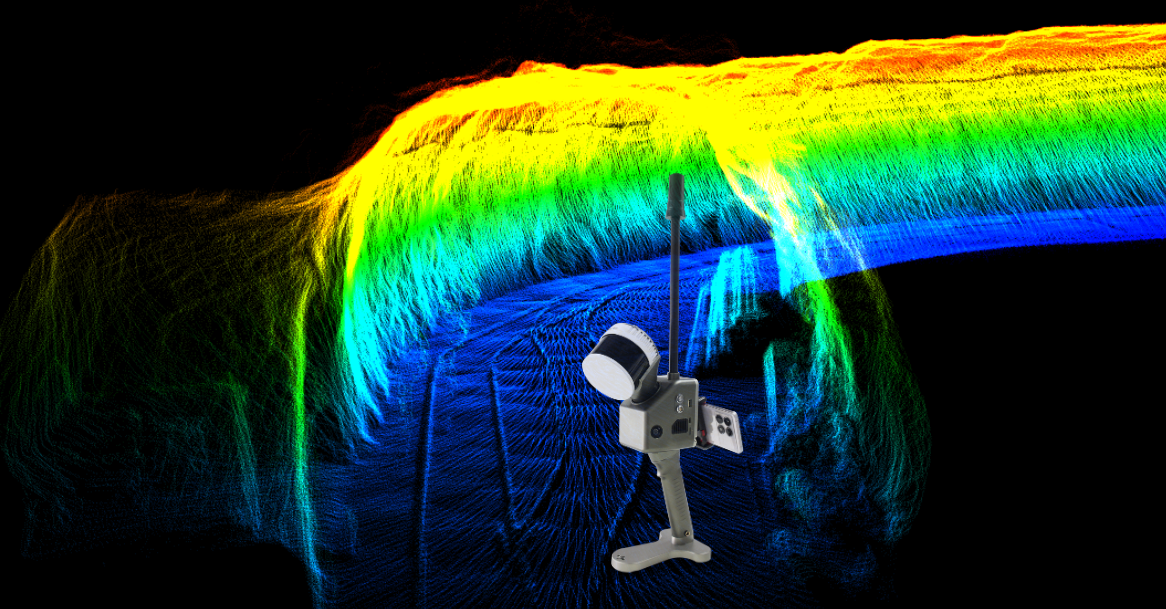
gCollector integrates two sets of three-dimensional laser scanners, six high-definition cameras, and the gSpin POS system. The entire system is installed on a vehicle platform for BEV data collection through video imaging and lidar scanning. It features fast measurement speed, high operational safety, comprehensive information acquisition, and relatively high data accuracy. The gCollector product is shown in Figure 4.

Figure 3. gSpin Post-processing Shuttle Figure 4. gCollector