Home
Home
About Geosun
About Geosun
Products
Products
- Hardware
- Mobile LiDAR Scanning System
- gCollector Road Information Collection System
- gSpin POS System
- PPK Solution
Support
Support
News
News
Contact Us
Contact Us
Background
Terrain surveying is an important means of obtaining spatial location information. Compared to traditional measurements, airborne LiDAR can significantly improve efficiency. Multi-echo technology, which penetrates vegetation, can save manpower and reduce errors caused by human factors in traditional surveys. It has broad prospects in terrain measurement.
Overview of the Survey Area

The project is located in a certain area of Jieyang City, Guangdong Province, China. The surveyed area is characterized by mountainous terrain with significant elevation changes, with a maximum height difference of 300 meters. The surrounding vegetation is dense, and there are several densely populated residential areas nearby. The project has a short duration, a large surveyed area, and high precision requirements.
Requirements and Challenges
Requirements:
The planning of flight routes in the surveyed area;
Coordinate System: CGCS2000
Submission of Results:DEM, DOM, DLG, etc..
Challenges:
Complex terrain: The surveyed area has dense vegetation, and traditional measurement methods cannot efficiently obtain accurate elevation data for the surveyed area.;
Tight deadline: The task requires data collection and output of results for the surveyed area to be completed within 3 days.
Difficulty in transitioning: The surveyed area has complex road conditions, making it time-consuming and challenging to transport traditional surveying equipment.
Precision requirement: Meet the requirements of 1:500 terrain surveying.
Solution

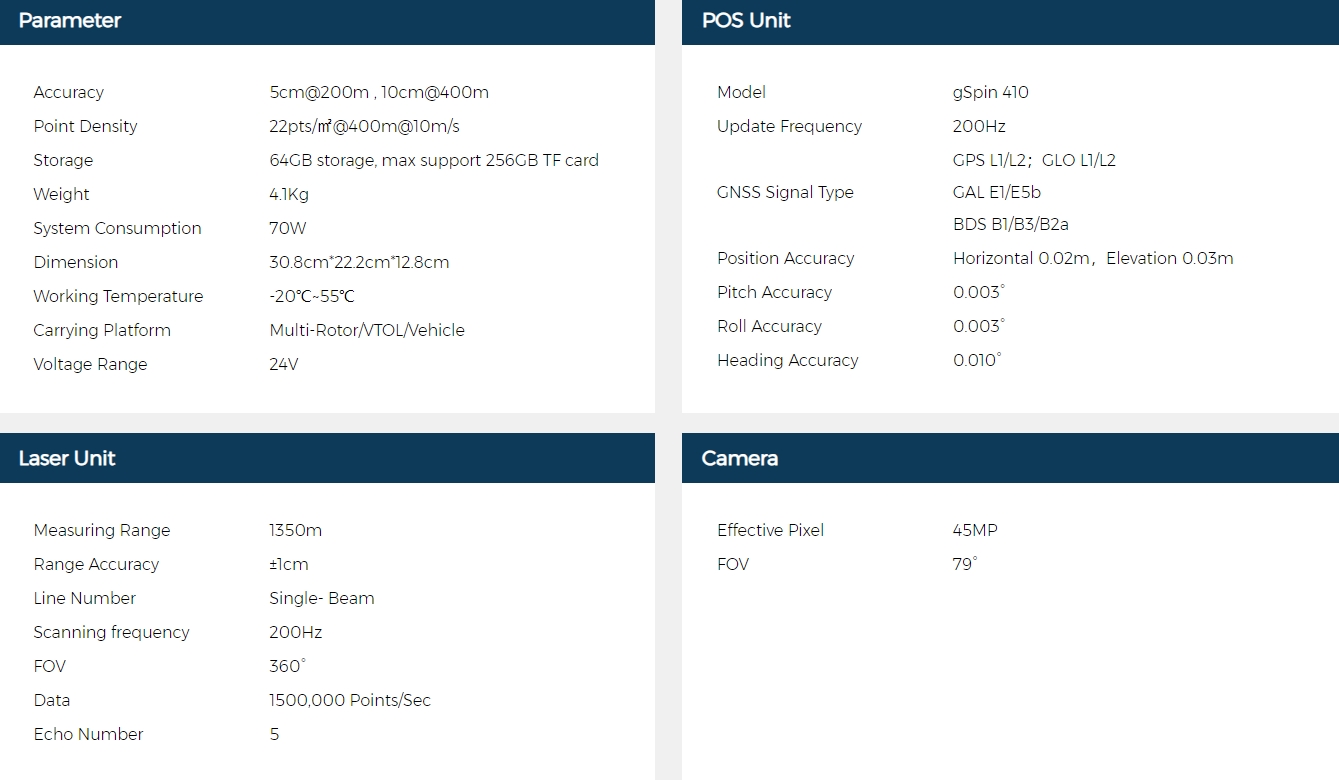
Based on a thorough understanding of the project, it has been decided to utilize the Geosun gAirHawk GS-1350N long-range LiDAR System for this task. The gAirHawk GS-1350N is a long-range airborne radar system developed independently by Geosun Navigation. The system integrates optical cameras and is capable of capturing image data simultaneously.
GS-1350N Specification:
CW-25E Fixed-wing UAV System
|
Hardware |
|
|
Length |
2.1m |
|
Wingspan |
4.35m |
|
Maximum Takeoff Weight |
31kg |
|
Control Range |
50km |
|
DGPS |
RTK/PPK |
|
Carrying Case Dimension |
1640×640×630mm |
|
Payload |
|
|
Mission payload |
3-6kg |
|
Flight |
|
|
Duration of Flight |
120-240min |
|
Economic Cruising Speed |
72km/h |
|
Wind Resistance |
7级(13.9-17.1 m/s) |
|
Rain and Snow Resistance |
Light rain or light snow (precipitation ≤ 10mm/24h) |
|
Takeoff and Landing Method |
VTOL |
|
Service Ceiling |
6000m |
|
Maximum Takeoff Altitude |
4000m |
|
Vertical Positioning Accuracy |
3cm |
| Horizontal Positioning Accuracy | 1cm+1ppm |
Software Introduction
|
Prossing Software |
trajectory calculation software |
※1. gAirHawk point cloud preprocessing software has complete independent intellectual property rights; ※2. Supports pure BeiDou signal data processing; ※3. Supports GNSS satellite selection function, improves positioning accuracy, optimizes calculation results; ※4. Supports PPK mode processing (must be verified in an offline environment to ensure data security); 5. Supports state-of-the-art GNSS single-epoch ambiguity resolution algorithms currently advanced internationally; 6. Supports direct reading of GNSS data formats from multiple brands and manufacturers such as NovAtel, Trimble, etc., including Rinex format and RTCM format, without the need for conversion before reading again (using the base station provided by the first party for verification); 7. GNSS solution supports position and velocity output; ※8. Trajectory output supports custom formats; ※9. GNSS/INS combination supports forward-backward-forward three-way return filtering, smoothing filtering function, to support no need for figure-eight or acceleration-deceleration correction, and eliminate the static process after the aircraft lands; 10. GNSS/INS combination supports odometer-aided calculation function, enabling continuous high-precision positioning even during GNSS signal loss; ※11. GNSS/INS combination Kalman filter can be configured with dynamic update and measurement update times; ※12. The software supports interactive user query functions, with bidirectional querying capabilities for searching graphical data by attributes and searching attribute data by graphics; ※13. The software has the functionality to display epoch sky plots, raw data, positioning and orientation results, etc., enabling users to analyze and optimize positioning results; ※14. The system supports common coordinate systems, allows users to define custom coordinate systems, and provides conversion between different coordinate systems; ※15. The software supports permanent free upgrades, and a single software license can be used simultaneously or non-simultaneously on multiple computers. A single software license can support data from multiple devices. |
|
Point Cloud Processing Software |
1. Supports multiple models of laser scanning systems, including laser scanning systems with different accuracies and measurement ranges; 2. The software can configure parameters for lasers in the field and also configure calculation parameters for laser point clouds; 3. The software can compute point clouds in real-time during data collection in the field, and it can also perform post-calculation of point clouds using collected raw laser data and post-processed POS (positioning) data; 4. The software can output point cloud data according to files or divide point cloud data output by flight strips. When outputting by flight strips, users can customize the output of point cloud data for specific time periods within each flight strip; 5. You can choose the output format, which can include the common LAS format and text (TXT) format for point cloud data; ※6. Output colored point clouds. If the device integrates a camera and the relevant camera-related files are provided, selecting this option during processing can output colored point clouds without the need for orthophoto generation; 7. It has calculation parameters and input parameters, and it can perform coordinate transformation functions. It can directly convert the output point cloud to local coordinates; ※8. It has a heading angle correction function, which allows adjustment of misalignment angles in the point cloud calculation software; ※9. The software supports one-click processing function, making it convenient to use. |
Note: Those marked with ※ are proprietary products of Geosun Navigation.
Field Implementation
1. Flight Path Planning
Through the system's customized flight planning software, select the corresponding product model, and plan flight routes that meet the required radar overlap rate. Simultaneously, plan simulated ground flight routes, set relative flight altitude, and flying speed. The flight routes feature coordinated turns to ensure maximum radar accuracy and safety. This guarantees that field flights can be easily and efficiently uploaded for executing survey tasks in the area.

▲ Flight Path Planning
2、Flight Operation
Setting up ground stations to collect static GNSS data for post-differential processing of trajectories.
3、Data Collection
After remaining stationary for five minutes, execute the planned flight route with a single click, synchronously collecting point cloud and image data.

Data Processing
1、Pre-processing
Sequentially import base station, rover station, raw radar files, and photo storage folders. The gAirHawk software automatically reads device parameters, and trajectory and color point cloud are synchronized for one-click processing.
▲ Import the raw data and perform one-click processing
2、Post-processing

▲ Orthophoto DOM generation

▲ Orthophoto Digital Line Graph (DLG) extent detailed map

▲ Digital Line Graph (DLG) creation for digitized line drawings

▲ Overlaying point cloud with orthophoto (DOM) and DLG

▲ Overlaying Digital Elevation Model (DEM) with DLG

▲ Overlaying Digital Orthophoto (DOM) with DLG
Accuracy Verification

After completing the operation, 30 elevation control points were manually measured within the survey area to verify the accuracy of the point cloud results. The coordinates of the control points were imported into TerraSolid software to generate a point cloud elevation accuracy report, which showed an accuracy of 0.046m, meeting the project requirements, as shown in the figure below:
Conclusion
By utilizing the gAirHawk GS-1350N long-range LiDAR system for this terrain project, several advantages of airborne LiDAR compared to other traditional methods include:
■ The operation is convenient, flexible, and suitable for surveying small, irregular areas;
■ The process is fast: field surveying and raw data collection take 0.5-1 hour, processing of point cloud and image data takes 2-3 hours, and terrain map generation takes 6-8 hours. The overall time from project implementation to deliverable output is approximately 10 hours;
■ The cost is low: the project requires only 2 technical personnel for implementation, with one day spent on fieldwork, significantly reducing labor and resource costs.
■ The quality is high: diverse data is obtained, providing rich detail, high precision point clouds, and excellent map quality.









