Home
Home
About Geosun
About Geosun
Products
Products
- Hardware
- Mobile LiDAR Scanning System
- gCollector Road Information Collection System
- gSpin POS System
- PPK Solution
Support
Support
News
News
Contact Us
Contact Us
Background
The project is located in the area of Wufeng Mountain in Changqing District, Jinan City. The terrain has an elevation difference of about 120 meters, and the vegetation in the surveyed area is dense, posing significant challenges to fieldwork and aerial surveys. Accurate modeling is required for parameters such as average diameter, average height, number of trees per hectare, volume per hectare, and average age of forest stands in the forest compartments.

Project Introduction
1. Hardware
The project adopts Geosun gAirHawk GS-130X for field data collection. The GS-130X LiDAR scanning system has become the optimal scheme due to its light weight, double echo and high precision, which effectively penetrates vegetation to acquire ground point data, providing great convenience for subsequent point cloud data processing.

GS-130X LiDAR scanning system
GS-130X Specification:
|
Parameter |
|
|
Accuracy |
5cm@100m |
|
Weight |
1.8kg(with battery) |
|
System Consumption |
25W |
|
Storage |
64GB storage, max support 128GB TF card |
|
Voltage Range |
12V-18V |
|
Dimension |
15.3 cm *9.3 cm *39.4cm |
|
Working Temperature |
-20℃-55℃ |
|
Carrying Platform |
Multi-Rotor/VTOL/Vehicle |
|
Laser Unit |
|
|
Measuring Range |
80m@10%, Max Range120m |
|
Range Accuracy |
士1.5cm |
|
Line Number |
32-channel |
|
Horizontal FOV |
360° |
|
Vertical FOV |
270° |
|
Data |
Double echo, 1,280,000 Point/sec |
|
Camera |
|
|
Effective Pixel |
26MP |
|
FOV |
360° |
2. Software
Due to the mountainous terrain in the surveyed area, which features significant elevation changes, we have selected WaypointMaster flight planing software to plan the flight routes for this aerial survey mission. The software can automatically insert intermediate calibration routes within the LiDAR's long-distance constant-speed straight flight path, thereby avoiding the issue of decreased absolute accuracy caused by inertial drift.
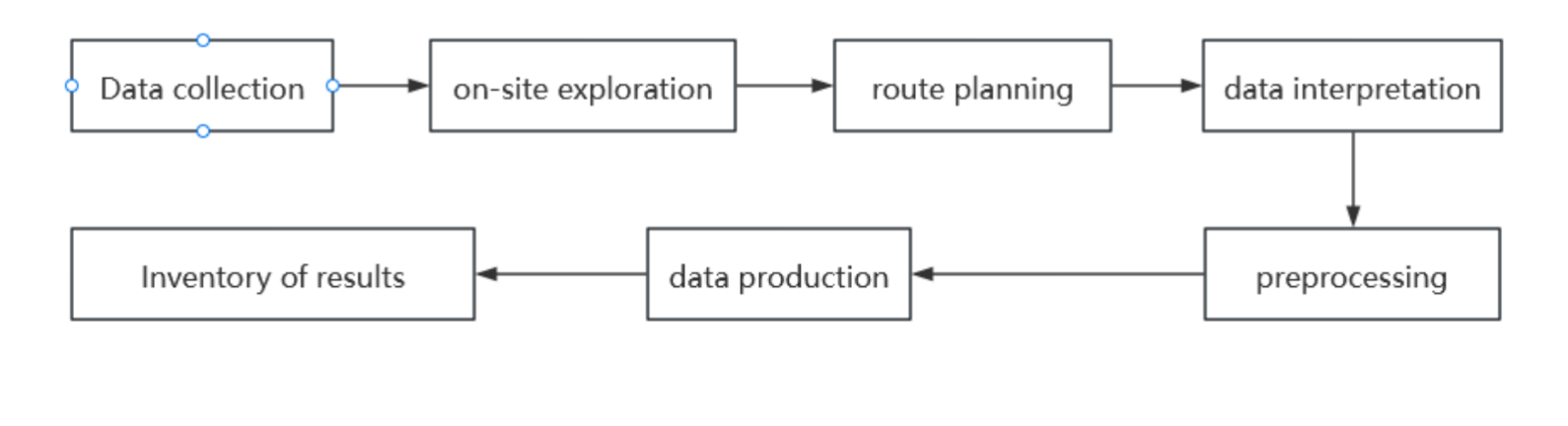
Work Flow Chart
3. Flight route by WaypointMaster Flight Planing Software

4. Data Processing
After the field flight is completed, we use gAirHawk to process the raw data. The raw data must include satellite observation data (.RTK) to ensure proper processing. Therefore, during field flights, it is necessary to maintain a fixed RTK connection. In case of no network signal in the field area, a multi-frequency base station (from mainstream brands) can be used for static observation. Only the name of the static observation data file needs to be changed for fusion processing. The post-processing with gAirHawk is one-click, requiring only the raw data. Users select the desired coordinate system, click "reconstruct," and point cloud data is generated. Compared to traditional laser point cloud preprocessing, this solution offers advantages in simplicity and ease of use, without requiring complex settings.
Scheme Process
1. Plan a Flight Route
Use our WaypointMaster flight planing software to plan terrain-following flight paths, and set relative altitude and flight speed. The flight routes are coordinated turns to maximize radar accuracy and safety. This ensures that field flights can be easily and efficiently uploaded to execute survey tasks.

▲Flight Routes
2. Set up Ground station
Ground stations are set up to collect static GNSS data for post-differential processing of trajectories.

▲Set up Ground station
3. Data Acquisition

After being stationary for five minutes, execute the planned flight path with a single click to synchronously collect point cloud and image data.
Data processing
1. Data Preprocessing
Import the base station, mobile station, radar raw files, and photo storage folder sequentially. The gAirHawk software automatically reads device parameters, and synchronously processes the trajectory and color point cloud data.
After outputting LAS data in gAirHawk, we import it into the Point Cloud Automata (PCA) software for data classification and analysis.
Firstly, we perform one-click terrain extraction. By utilizing the one-click terrain extraction function in mountainous areas, ground points can be quickly and effectively extracted. Point Cloud Automata employs an object-oriented filtering classification method, which enhances the accuracy of ground point extraction. This significantly reduces the workload of manual editing in post-processing, thus lowering operational costs.
We utilize the object-based filtering method in Point Cloud Catalyst software to identify ground points within point cloud data. This filtering method offers advantages such as insensitivity to outliers and point cloud thickness characteristics.

▲Ground Point

▲DEM Model
Point Cloud Post-processing (Classification)
The one-click mountainous point cloud classification (parameter-free version) from the GS-130X, enables precise classification of untreated point clouds effectively without the need to set parameters.

▲PCA One-click Point Cloud Classification Result

Check the elevation accuracy of control points as shown in the figure. Sort by elevation error in descending order. Among them, there are 8 points with elevation errors greater than 10cm, while the remaining 41 points are within 10cm. The average root mean square error is 7.5cm.
Point Cloud Post-processing (Single tree segmentation)
In forestry surveys, point clouds play a significant role. Previous forestry resource surveys mostly relied on manual measurements. Now, we can rapidly scan using LiDAR and later conduct single tree segmentation on the point cloud data. This allows us to obtain data on the number of trees, crown width, diameter at breast height (DBH), height, etc., within the surveyed area.
The analysis of the point cloud within the surveyed area through single tree segmentation reveals that there are approximately 1400 trees in this area. The information will ultimately be summarized in a tabular document for a more effective and intuitive presentation.

The single tree segmentation results are shown in the above figure. The corresponding parameters extracted for some individual trees are presented in Table 1. By analyzing the output CSV-format forestry statistics report (as shown in Table 1), we obtain the statistical information of the forest parameters for the entire forest area, as shown in Table 2. From Table 2, it can be observed that there are a total of 3422 trees in the forest area, with the minimum tree height being 1.27m, the maximum tree height being 25.04m, and the average tree height being 8.93m. The average crown diameter is 5.63m, and the average crown area is 15.32 square meters.

Table 1

Table 2

Single Tree Segmentation Information Statistics
The analysis of the point cloud within the surveyed area through single tree segmentation reveals that there are approximately 1400 trees in this area. The information will ultimately be summarized in a tabular document for a more effective and intuitive presentation.









