Home
Home
About Geosun
About Geosun
Products
Products
- Hardware
- Mobile LiDAR Scanning System
- gCollector Road Information Collection System
- gSpin POS System
- PPK Solution
Support
Support
News
News
Contact Us
Contact Us
Simultaneous Localization and Mapping (SLAM) technology has emerged as a transformative force in the realm of LiDAR scanning, significantly influencing the accuracy and precision of data collection processes. By seamlessly integrating sensor data and advanced algorithms, SLAM plays a pivotal role in enhancing the reliability and efficiency of LiDAR scanning systems. Let's delve deeper into how SLAM technology affects the accuracy of LiDAR scanning and the key mechanisms at play.

Simultaneous Localization and Mapping (SLAM) is a sophisticated algorithm that integrates data from the onboard sensors of your mapping system, including LiDAR, RGB cameras, IMUs, and more, to determine your trajectory as you navigate through an environment.
Here's a simplified breakdown of how SLAM operates: Upon system initialization, the algorithm leverages sensor data and computer vision technology to analyze the surroundings and accurately estimate your current position.
As you progress, SLAM utilizes the initial position estimate, gathers new data from the system's sensors, compares it with previous observations, and recalculates your position in real-time.
By iteratively executing these steps, the SLAM system continuously tracks your movement throughout the environment with precision.
A SLAM algorithm executes these intricate calculations numerous times per second, effectively automating the process of mapping your trajectory as you traverse through the space.
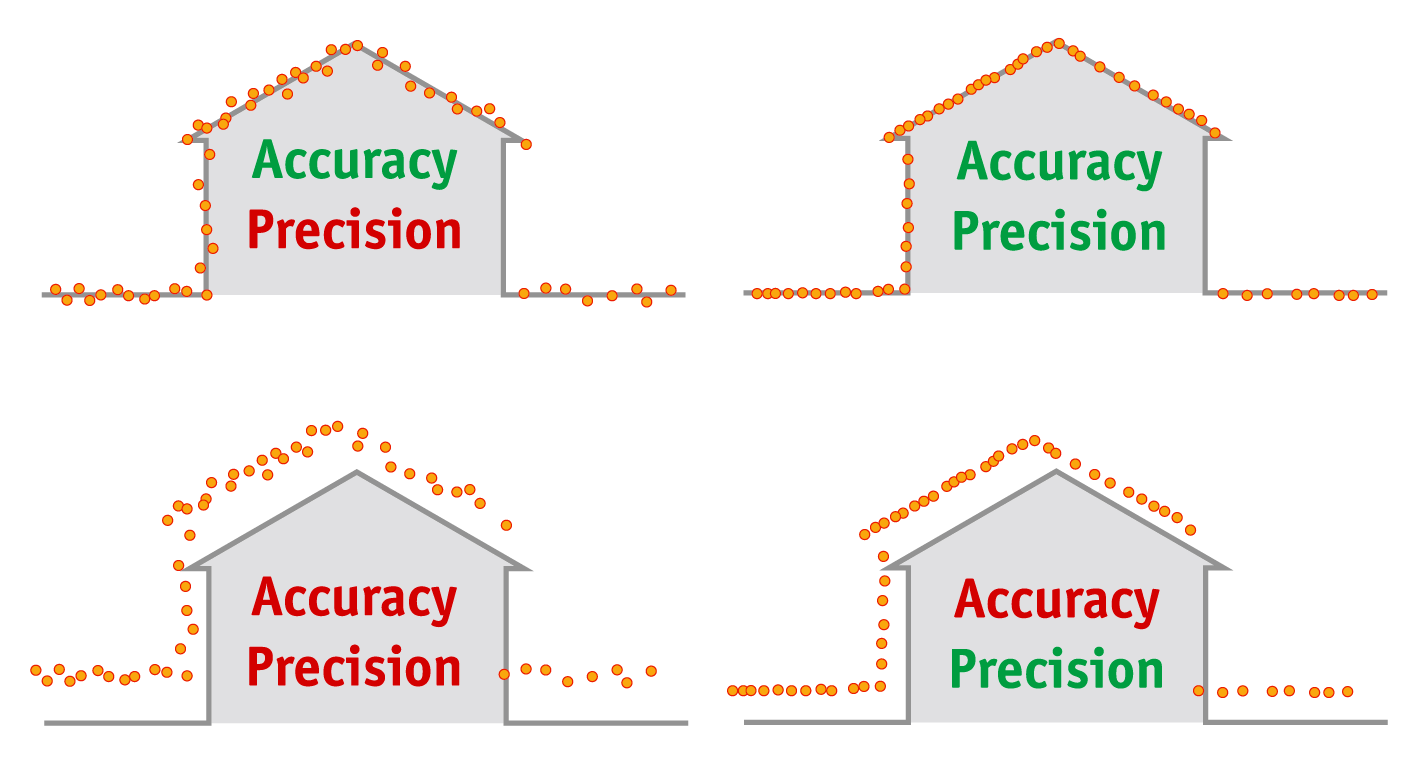
Understanding the precision of a SLAM device necessitates grasping a fundamental contrast in data acquisition methods employed by mapping systems.
In a terrestrial laser scanner (TLS), the device captures its environment by rotating a laser sensor 360° and registering measurements from a fixed position. Consequently, each point in the captured point cloud is inherently aligned accurately in space relative to the scanner.
Conversely, a mobile mapping system also rotates a laser sensor 360° but not from a fixed point. As you move through the environment during scanning, the sensor moves along with you, introducing alignment discrepancies for each measurement and compromising the final point cloud's accuracy.
This scenario is akin to the effect of camera movement when taking a night photograph, resulting in blurriness. Similarly, inspecting the unprocessed data from a mobile mapping system before SLAM algorithm refinement reveals scattered and duplicated points, indicating alignment issues.
A mobile mapping system is engineered to rectify these alignment errors and generate a precise, orderly point cloud. It achieves this by leveraging the trajectory data recorded by the SLAM algorithm. This information enables the system to ascertain the scanner's position at the moment of each measurement, facilitating accurate spatial alignment of the points.
Consequently, the accuracy of a mobile mapping system powered by SLAM hinges not only on the sensor's precision but also significantly on the efficacy of the SLAM algorithm in tracking your trajectory.
Developing SLAM algorithms that accurately track trajectories and generate high-quality point clouds posed a significant challenge for manufacturers, who had to address two main types of errors.
The first type of error, known as tracking error, arises when SLAM algorithms encounter difficulties in certain environments. For example, in long hallways where distinctive environmental features are scarce, SLAM systems may struggle to maintain accurate location tracking.
In more demanding environments, SLAM systems can experience breakdowns. This occurs when mapping inaccuracies occur during scanning, often due to a lack of distinctive features in the environment or high levels of noise. In such cases, utilizing control points does not effectively resolve the issue.
While some instances of SLAM breakdown can be rectified during post-processing, extreme cases may remain uncorrectable. In these scenarios, the absence of data on how to distribute differences in distances between control point coordinates and scanned control point coordinates inhibits the correction of trajectory breakdowns.
The second type of error, referred to as drift, stems from the inherent measurement errors produced by sensors used in SLAM algorithms to calculate positions. As SLAM algorithms iteratively calculate positions based on previous data points, sensor errors accumulate during scanning, leading to trajectory inaccuracies and a decline in the final results' quality.
Drifting SLAM errors are more prevalent in outdoor settings due to the larger spatial area, contrasting with indoor environments. Drift results in scans that are matched correctly to the map but exhibit distortions due to sensor imperfections, causing errors to accumulate over time. Employing surveyed control points during post-processing typically helps rectify datasets affected by drift.
URL:https://www.geosuntech.com/News/230.html
Previous:Common Terms on the LiDAR Scanner Datasheet That You Need to Know
Next:Small Size, Big Impact | Handheld LiDAR: Precision for the Digital Age