Home
Home
About Geosun
About Geosun
Products
Products
- Hardware
- Mobile LiDAR Scanning System
- gCollector Road Information Collection System
- gSpin POS System
- PPK Solution
Support
Support
News
News
Contact Us
Contact Us
In the rapidly evolving field of surveying and mapping, LiDAR (Light Detection and Ranging) technology has emerged as a powerful tool for capturing high-resolution spatial data. To effectively utilize LiDAR systems, accurate positioning and mapping are crucial. Two prominent techniques for achieving this are SLAM (Simultaneous Localization and Mapping) and GNSS (Global Navigation Satellite System). Each method has distinct advantages and limitations, making them suitable for different surveying scenarios. This article delves into the comparison between SLAM and GNSS in the context of LiDAR surveying, exploring their operational principles, strengths, and weaknesses.
SLAM is a technology that enables a device to build or update a map of an unknown environment while simultaneously keeping track of its own location within that environment. It is particularly useful in environments where GNSS signals are weak or unavailable, such as indoors, underground, or in densely built urban areas. SLAM relies on sensors, such as LiDAR, cameras, and IMUs (Inertial Measurement Units), to gather data about the surroundings and estimate the device's position relative to the map being created.
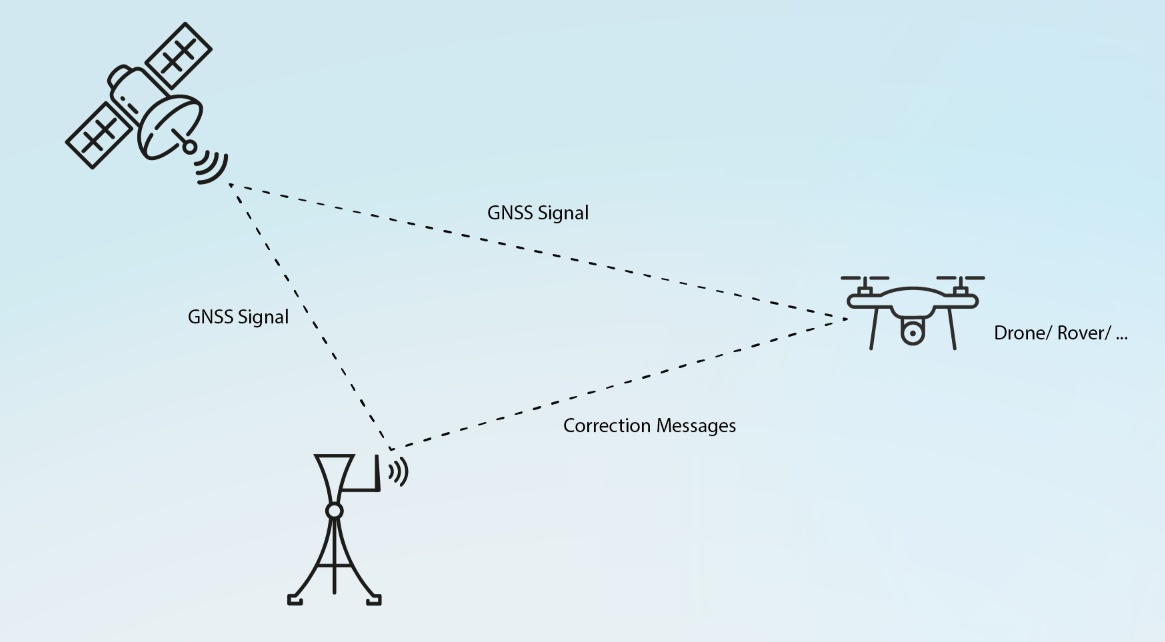
GNSS, which includes systems such as GPS, GLONASS, Galileo, and BeiDou, provides global positioning information by using satellite signals. GNSS is widely used in surveying due to its high accuracy and reliability in open outdoor environments. The system works by receiving signals from multiple satellites and using these signals to calculate precise geographic coordinates. GNSS is well-suited for large-scale surveying projects and applications where high positional accuracy is required over extensive areas.
SLAM: The accuracy of SLAM is heavily dependent on the quality of the sensors used and the environment in which it operates. In environments with complex structures or where GPS signals are weak, SLAM can offer high precision by integrating data from LiDAR and other sensors. However, SLAM’s performance can degrade in highly dynamic or featureless environments due to challenges in feature extraction and data association.
GNSS: GNSS provides high accuracy in open areas with clear visibility to satellites. Modern GNSS systems can achieve centimeter-level precision with the help of correction signals and differential techniques. However, GNSS accuracy can significantly decline in obstructed environments, such as urban canyons or heavily wooded areas, where satellite signals are blocked or reflected.
SLAM: One of SLAM’s greatest strengths is its versatility in various environments. It excels in indoor settings, subterranean locations, and densely built urban areas where GNSS signals are unreliable or unavailable. SLAM's ability to operate in environments with limited satellite visibility makes it invaluable for applications like indoor mapping and autonomous navigation.
GNSS: GNSS is ideal for large-scale, outdoor surveying projects where there is an unobstructed view of the sky. It is commonly used in applications such as land surveying, construction, and agriculture. In open spaces, GNSS provides reliable and consistent positional data, making it suitable for extensive area mapping.
SLAM: SLAM systems often involve complex real-time data processing to construct maps and localize the device simultaneously. This requires significant computational resources and can be affected by the processing speed and algorithm efficiency. Advances in computing power and algorithm design are continually improving SLAM’s real-time capabilities.
GNSS: GNSS data processing is generally straightforward, as it involves interpreting satellite signals to compute position. Real-time GNSS positioning can be highly accurate with the use of real-time kinematic (RTK) or other augmentation techniques. The simplicity and efficiency of GNSS data processing make it well-suited for applications requiring immediate positional information.
SLAM and GNSS Integration: In practice, SLAM and GNSS are often used in conjunction to leverage the strengths of both technologies. For instance, GNSS can provide initial position estimates and coarse localization, while SLAM can refine these estimates and provide detailed mapping in environments where GNSS signals are weak or intermittent. Hybrid systems can offer a comprehensive solution for diverse surveying scenarios, combining the strengths of each technology.

Handheld SLAM LiDAR devices are typically products of SLAM and GNSS integration. They combine SLAM for high-precision mapping and positioning in complex environments with GNSS for accurate location tracking in open areas. This integration leverages the strengths of both technologies for improved overall performance.
GNSS and SLAM Hybrid: Combining GNSS with SLAM can enhance performance in environments where GNSS is partially obstructed but still available. The GNSS system can provide global positioning and initial orientation, while SLAM handles local mapping and localization. This hybrid approach improves overall accuracy and reliability, especially in semi-urban or mixed environments.
Both SLAM and GNSS offer valuable capabilities for LiDAR surveying, each with its unique advantages and limitations. SLAM is highly versatile, making it suitable for environments where GNSS signals are not reliable. Its ability to build and update maps in real-time allows for detailed indoor and urban mapping. On the other hand, GNSS excels in providing high-precision global positioning in open outdoor areas, making it ideal for large-scale and straightforward surveying tasks.
The choice between SLAM and GNSS ultimately depends on the specific requirements of the surveying project, including the environment, desired accuracy, and data processing capabilities. In many cases, integrating both technologies can provide a comprehensive and robust solution, offering the benefits of precise global positioning and detailed local mapping. As technology continues to advance, the combination of SLAM and GNSS is likely to become increasingly prevalent, providing surveyors with powerful tools for capturing and analyzing spatial data.
URL:https://www.geosuntech.com/News/234.html
Previous:Handheld SLAM LiDAR vs Terrestrial LiDAR: A Comprehensive Comparison
Next:The Prospects and Challenges of Handheld SLAM Technology