Home
Home
About Geosun
About Geosun
Products
Products
- Hardware
- Mobile LiDAR Scanning System
- gCollector Road Information Collection System
- gSpin POS System
- PPK Solution
Support
Support
News
News
Contact Us
Contact Us
LiDAR, an acronym for Light Detection and Ranging, has emerged as a transformative technology, revolutionizing fields ranging from autonomous vehicles to environmental monitoring. Its main performance parameters include wavelength, detection range, frequency, field of view (FOV), angular resolution, data rate, number of beams, etc.. Understanding these key parameters is essential for grasping its capabilities fully.

Wavelength of LiDAR System
Due to the need to avoid damage to the human eye caused by visible light, there are two wavelength options commonly used in LiDAR:
Wavelength below 1000 nanometers: A typical value is 905nm. This wavelength range allows the use of silicon as a receiver, resulting in lower costs and mature products. It is the preferred choice for most LiDAR manufacturers.
Wavelength between 1000 and 2000 nanometers: A typical value is 1550nm. In this wavelength range, silicon cannot be used as a detector, requiring the use of detectors made of materials such as Germanium (Ge) or Indium Gallium Arsenide (InGaAs). Although the cost is higher, the 1550nm wavelength has a higher safety threshold for the human eye. Therefore, LiDAR systems using this wavelength can emit higher laser power to achieve greater ranging sensitivity.
Currently, LiDAR systems using a 905nm wavelength have become the most mainstream choice. In addition to the laser emitter, longer wavelengths also pose challenges for filters, as thicker coatings are required, making it difficult to deposit layers and reducing yield rates. Therefore, the price of LiDAR systems using a 1550nm wavelength is significantly higher.
Detection Range of LiDAR System
Detection range refers to the maximum distance at which a LiDAR sensor can reliably detect objects and measure their distances. It encompasses both the physical limits of the sensor's capabilities and the environmental conditions in which it operates.
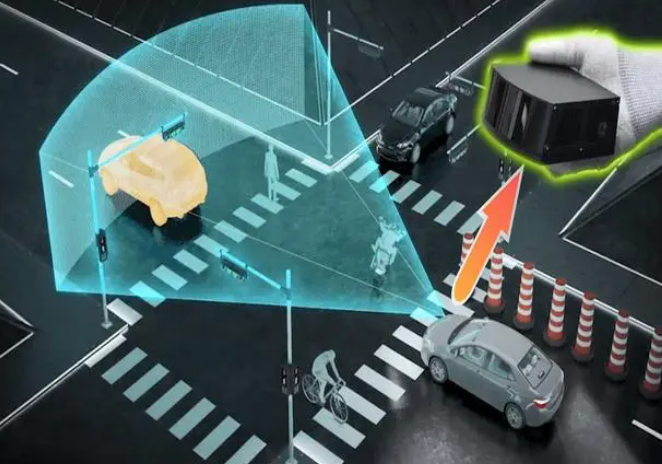
For automotive LiDAR systems commonly used in autonomous vehicles, the detection range typically ranges from tens to hundreds of meters. These LiDAR systems are designed to detect objects such as vehicles, pedestrians, and obstacles in the vehicle's path, allowing for safe navigation and collision avoidance. In other applications such as environmental monitoring or infrastructure inspection, the detection range may vary based on the specific requirements of the task. LiDAR systems used for forestry, topographic mapping, or geological surveying may have longer detection ranges to capture detailed terrain information over large areas.
It's essential to consider that the detection range specified by manufacturers may be influenced by factors such as the laser power, receiver sensitivity, scanning pattern, and atmospheric conditions. Adverse weather conditions like fog, rain, or dust can reduce the effective detection range by attenuating laser pulses or scattering light.
Frequency of LiDAR System
The frequency of a LiDAR system refers to the rate at which laser pulses are emitted by the LiDAR sensor. This frequency is typically expressed in Hertz (Hz), representing the number of pulses emitted per second.
The frequency of a LiDAR system is a crucial parameter that affects several aspects of its performance, including its data acquisition speed, resolution, and accuracy. Higher frequencies allow for faster data collection and denser point clouds, which can improve the system's ability to detect and map objects with precision. However, the optimal frequency for a LiDAR system depends on various factors, including the specific application, environmental conditions, and the desired trade-offs between speed and resolution.
FOV of LiDAR System
The FOV (Field of View) of a LiDAR system refers to the angular range within which the LiDAR sensor can detect objects or measure distances. It represents the extent of the area that the LiDAR system can "see" or cover during a single measurement or scan. It can be divided into Horizontal Field of View (HFOV) and Vertical Field of View (VFOV).
HFOV refers to the angular range over which the LIDAR sensor can detect objects or gather data in the horizontal plane. It represents the extent of the scene that the LIDAR sensor can cover from left to right without physically moving the sensor. VFOV in a LIDAR system refers to the angular range over which the sensor can detect objects or gather data in the vertical plane. It represents the extent of the scene that the LIDAR sensor can cover from top to bottom without physically moving the sensor.
In terms of specific values, the FOV can vary widely among different LiDAR systems. Some may have horizontal FOV ranging from a few degrees to over 360 degrees, depending on whether they're designed for narrow or panoramic scanning. Similarly, the vertical FOV can range from a few degrees to over 90 degrees, covering everything from a narrow slice of the environment to a nearly complete hemisphere.
It's important to note that the FOV of a LiDAR system is a critical parameter that influences its suitability for specific applications. For instance, in autonomous vehicles, a LiDAR with a wide FOV might be preferable to ensure comprehensive environmental awareness, while LiDARs with narrower FOVs might be suitable for applications requiring higher precision in a limited field of view, such as robotics or industrial automation.
Angular Resolution of LiDAR System
The Angular Resolution of a LiDAR system refers to the smallest angular increment or step at which the system can distinguish between different points or objects in its field of view. It essentially determines the level of detail that the LiDAR system can capture within its scanning range.
The angular resolution of a LiDAR system depends on several factors, including:
Hardware Design: The design of the LiDAR sensor itself, including the number and arrangement of laser beams or channels, the scanning mechanism (if applicable), and the sensor's overall optical configuration, all influence its angular resolution.
Sampling Rate: The rate at which the LiDAR system samples the environment, often measured in points per second or points per rotation (for rotating LiDARs), also affects angular resolution. Higher sampling rates generally result in finer angular resolution.
Processing Algorithms: Signal processing algorithms employed by the LiDAR system to interpret and reconstruct the raw data can also influence angular resolution.
Data Rate of LiDAR System
The Data Rate of a LiDAR system refers to the amount of data the system generates or collects over a specific unit of time, typically measured in bits per second (bps) or bytes per second (Bps).
The data rate of a LiDAR system is an essential consideration for applications where real-time data processing or transmission is required, such as autonomous vehicles, robotics, and surveillance. Higher data rates may require more significant computational resources for processing and storage and may also affect the choice of data transmission and storage solutions.
Number of Beams of LiDAR System
The "Number of Beams" in a LiDAR system refers to the quantity of laser beams emitted by the LiDAR sensor to scan its surroundings and collect data. Each laser beam emits pulses of light and measures the time it takes for the light to reflect off objects in the environment and return to the sensor, allowing the LiDAR system to generate a 3D representation of the scene.
The Number of Beams is a critical parameter that influences various aspects of the LiDAR system's performance and capabilities:
Coverage: A higher number of beams generally results in more comprehensive coverage of the environment, as more points are sampled and captured within the LiDAR system's field of view. This can lead to denser and more detailed point cloud data.
Resolution: The Number of Beams affects the spatial resolution of the LiDAR system. More beams mean that the system can capture finer details and distinguish between objects with higher precision.
Scanning Speed: The speed at which the LiDAR system can scan its surroundings may be influenced by the Number of Beams. Increasing the number of beams may require more time to complete a full scan, depending on the scanning mechanism and hardware design.
Data Rate: The Number of Beams contributes to the overall data rate of the LiDAR system. More beams mean that more data points are generated per scan, potentially leading to higher data rates.
Detection and Accuracy: A higher number of beams can improve the LiDAR system's ability to detect and accurately represent objects, particularly small or distant ones, within its field of view.
URL:https://www.geosuntech.com/News/180.html
Previous:What are Heading Angle, Roll angle and Pitch Angle of Airborne LIDAR