Home
Home
About Geosun
About Geosun
Products
Products
- Hardware
- Mobile LiDAR Scanning System
- gCollector Road Information Collection System
- gSpin POS System
- PPK Solution
Support
Support
News
News
Contact Us
Contact Us
The principle of obstacle detection and avoidance in intelligent driving vehicles with semi-solid-state LiDAR is mainly based on its ability to capture precise three-dimensional information about the surrounding environment. Specifically, this process can be divided into several steps:

Data Collection:
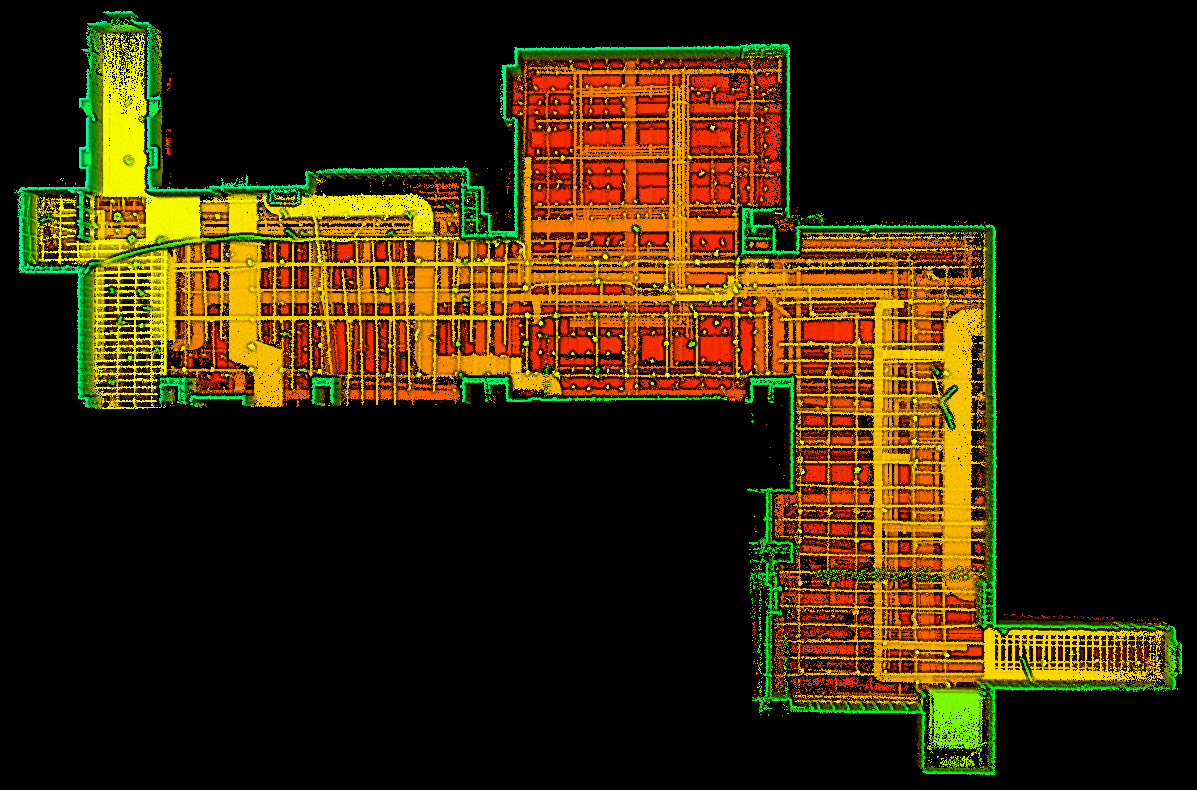
The semi-solid-state LiDAR collects data by emitting laser beams and receiving the laser reflected. These laser beams can cover a certain area around the vehicle, forming what is known as "point cloud" data.
Point cloud data contains distance information of various objects in the environment, namely the distance between each point and the LiDAR. This point cloud data can be used to construct a three-dimensional map of the surrounding environment.
Data Processing:
The intelligent driving system processes this point cloud data to identify obstacles within it. Processing methods include direct computation of point cloud data, conversion of point cloud data into other forms of data before computation, or a combination of both approaches.
By analyzing the point cloud, the system can determine crucial information such as the size, shape, and distance of obstacles, which is vital for collision avoidance.
Environmental Modeling:
LiDAR data can also be used to build a three-dimensional model of the surrounding environment, which is extremely useful for path planning and devising obstacle avoidance strategies.
Obstacle Avoidance Strategies:
Based on the information mentioned above, the intelligent driving system can formulate obstacle avoidance strategies. For example, if an obstacle is detected ahead, the system may decide to decelerate or alter the driving route to avoid collision.
Furthermore, compared to traditional mechanical LiDAR, semi-solid-state LiDAR may have some limitations in terms of uniformity in horizontal field of view scanning range and ranging capability. However, they typically feature a more compact structure, higher reliability, and lower cost. These factors make them highly suitable for obstacle detection and avoidance in intelligent driving vehicles.
In summary, the application of semi-solid-state LiDAR in intelligent driving vehicles achieves obstacle detection and avoidance through precise three-dimensional environmental perception. Its high precision and reliability make it an indispensable component of intelligent driving systems.
URL:https://www.geosuntech.com/News/207.html
Previous:The principle of Environment Perception of Solid-state LiDAR in Intelligent Driving
Next:Everything You Need to Know About the Handheld LiDAR Scanner